







 Позвонить бесплатно
Позвонить бесплатно
Спецификация отправлена на Ваш E-mail.
Данное письмо может попасть в папку "СПАМ"
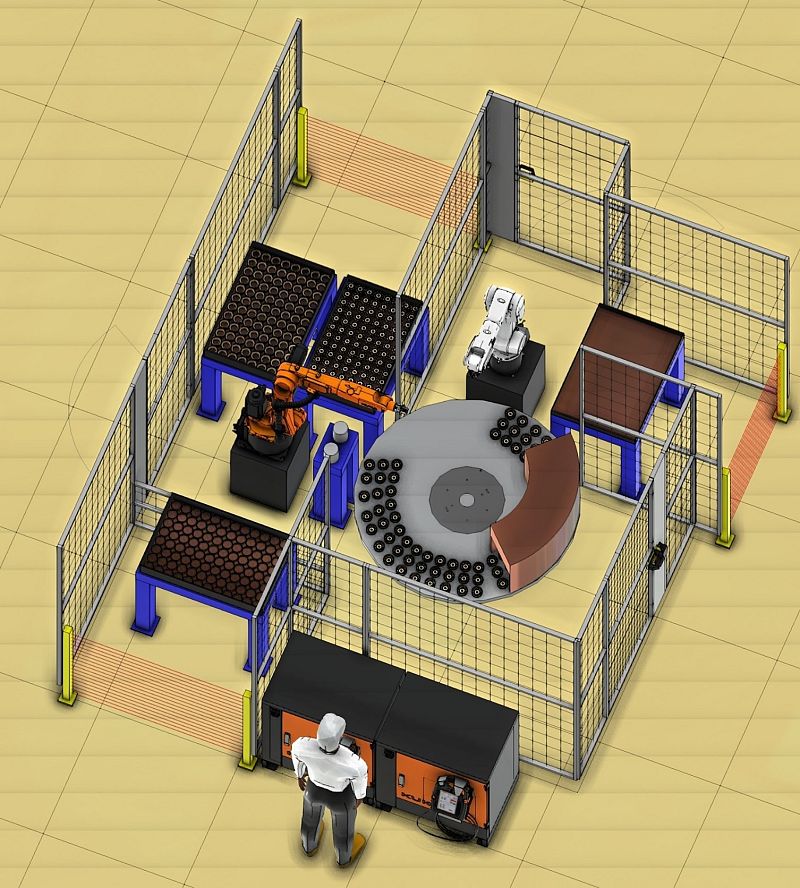
Робото-технологический комплекс (РТК) для сборки восковых моделей
Описание РТК
РТК укомплектован двумя промышленными роботами: первый KR 10 R1420 Cybertech nano оснащен пневматическим трехпальцевым захватом и сканером СТЗ и осуществляет сборку восковых моделей; второй робот KR 10 R1100-2 Agilus оснащен трехпальцевым захватом и осуществляет снятие готовых изделий с поворотного стола и укладку на паллеты для готовой продукции. Поворотный стол дооснащается сервомотором KUKA, что позволит управлять поворотом стола с контроллера робота KRC4.
Описание технологического процесса
- Персонал укладывает на поддоны кольца, крыльчатки и обоймы, каждый слой прокладывается гофрокартоном.
- Персонал производит контроль оснастки.
- Персонал устанавливает поддоны с кольцами, крыльчатками и обоймами в строго определенные места по упорам. Поддон для готовых деталей также устанавливается по упорам. (см. Рис.2)
- Персонал собирает и выставляет по уровню (если это необходимо) технологическую оснастку в масленках для смачивания деталей клеем.
- Оператор с пульта управления запускает программу сборки.
- Робот KR 10 R1420 Cybertech при помощи сканера СТЗ определят положение обоймы на поддоне, производит её захват, затем смачивает клеем окуная в масленку и устанавливает на поворотный стол.
- Робот KR 10 R1420 Cybertech при помощи сканера СТЗ определят положение крыльчатки на поддоне, производит ее захват и устанавливает на обойму, установленную ранее на поворотном столе. Для распределения клея вдоль лопатки робот сначала проворачивает крыльчатку против направления лопаток на 180-270°, затем в обратном направлении на 180-270°.
- Робот KR 10 R1420 Cybertech при помощи сканера СТЗ определят положение кольца на поддоне, производит его захват, затем смачивает клеем окуная в масленку и устанавливает на полусборку (обойма + крыльчатка), собранную ранее на поворотном столе. Для распределения клея робот поворачивает кольцо на полусборке на 180-270°
- Далее выполняются операции описанные в п.п. 6-8 для последующих деталей.
- По мере заполнения собранными деталями поворотный стол поворачивается. Детали проходят под сушильной камерой.
- После прохождения полного круга на поворотном столе, робот KR 10 R1100-2 Agilus снимает их со стола и укладывает на поддон для готовых деталей.
- При завершении слоя заготовок (стаканы, крышки с лопатками, втулки) РТК останавливается. Персонал снимает гофрокартонную прокладку на поддонах.
- Далее цикл повторяется с п.5 до тех пор, пока заготовки в поддонах не закончатся.
Примечание:
- В предлагаемом решении применены высокоточные захваты SCHUNK и роботы KUKA, что позволяет производить сборку деталей с точностью ± 0,15мм. без использования центрирующей оснастки.

Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




